ME 481: Biomedical Team

University of Hawaii at Manoa
Generating Design Concepts
Our primary objective is to design and manufacture an active needle prototype capable of multi-directional deflection that is equipped with a reset mechanism and proper thermal insulations. At this stage of design, our group is primarily focused on the development of a bending mechanism and means of reverting the needle to its original linear position.
Multiple design concepts were considered with this focus in mind while using the model previously designed by Dr. Bardia Konh (see Figure 1 below) as our basis. This prototype was comprised of two hollow Nitinol tubes, a flexible connection piece, an actuator Nitinol wire, and a nail tip used as the needle tip.
Figure 1. Initial prototype created by Dr. Bardia Konh
After much thought and consideration, the BioMed team proposed the following design concepts; each accompanied by a brief description, as well as pros and cons.
Design 1:
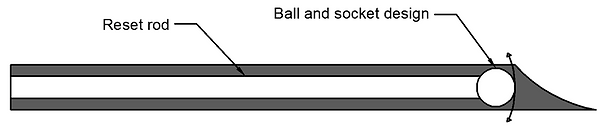
The team’s first design concepts was brought to us by Dr. Konh and can be seen in Figure 2 below. This design incorporated a ball and socket joint with three degrees of freedom, which allows the needle tip to rotate freely without translation. This design used a reset rod to counteract the contraction caused by the heating of the SMA wires, and therefore, returning the need to its linear position. The needle tip in this design is able to rotate through a wide range of motion, which is an important feature in the placement of radioactive seeds. A concern regarding this design is that the reset rod may cause unwanted translation in the patient's body. Another con to this design is that there is no way to pass a seed through the joint as the reset rod requires contact with a solid curved surface on the tip section.
Figure 2. First design concept: ball and socket design with reset rod
Design 2:
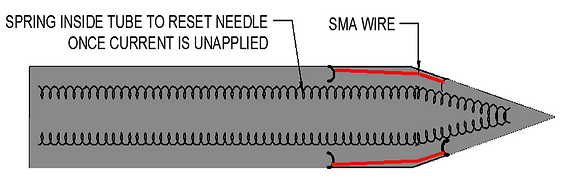
The second design consideration can be seen in Figure 3 below. This design focused on the reset mechanism in order to lengthen contracted SMA wires after heating. It proposed that springs (or a material with spring behavior) are placed opposite the actuation wires on the inside of the needle. However, while the springs would potentially revert the needle to its original position, this model would require more force to achieve needle tip deflection. This may not be ideal or possible for the small wires and could result in a lower deflection. Additionally, the spring would have needed to be small enough to be encased in the needle with SMA wiring and additional actuating elements, and still allow for potentially a seed to be passed through.
Figure 3: Second design concept: spring placed inside to aid in reverting needle to linear position
Designs 3 and 4:
Design three drawed inspiration from a flexible drinking straw available at many eating establishments. It used a combination of a shape memory polymer (SMP) and an actuating wire located opposite the initial contracting wire as a reverting mechanism. Like SMAs, SMPs are polymers that are able to be heat treated to remember certain positions. This design requires a material that is strong enough to act as a reverting mechanism while concurrently remaining flexible for bending and deflection, one of the reasons a SMP was considered. Another consideration of this design was to run the SMA wires through the flexible hinge material. However, high actuation temperatures could have cause flex joint to melt and/or could have altered its material properties. A positive factor is that this model has the ability to feed a radioactive seed through the joint.
Figure 4. Third design concept: “Bendy Straw” design v.1
Similar to design three, the next design builds off the same bendy draw concept, however, it uses multiple metal segments. This allows the needle to have a smoother bend, which is a more preferred bending motion instead of a sharp bend that would come from having one joint. However as this needle is comprised of many segments, it may be difficult to assemble and manufacture. Additionally, the increased number of parts could result in a greater opportunity for failure during use.
Figure 5. Fourth design concept: “Bendy Straw” design v.2
Design 5:
A fifth design concept originally considered was a design inspired by a air duct elbow joint. This design would consist of one or two tube segments cut with the shape shown below in Figure 6. Early on our team saw complications with this design and decided to scrap it altogether.
Figure 5. Fifth design concept: HVAC elbow design
Design 6:
A more recent addition to the design considerations was based off an article published in a september 2016 volume of Journal of Medical Devices. This article discussed the design of a cable-driven joint for laparoscopy instruments. Modifying the design for our application, we were able to come up with the following design.
Figure 7. Sixth design concept: laparoscopy inspired multi-link joint
This design is also very similar to design four with its multiple sections, allowing for a smoother bend, and its ball and socket joints. The springs placed in between each link in this design ensures the bend is distributed evenly amongst the joints between each link.
Thermal Insulation
Human cells begin to die around 40 °C but the heat actuators require a temperature range of 60 to 80 °C to operate and this causes a major issue. In order to tackle this problem we need to look into what materials are available to insulate the wires or or potentially the entire needle body, without sacrificing an unreasonable amount of volume. Another Making a Decision Making Matrix (DMM) will be the most logical approach to this. A seemingly simple solution is to place the wire inside the nitinol tubing instead of having it on the outer region, however, this may potentially increase the overall needle diameter. It is likely that we are going to have to utilize both ideas, choosing a well insulated material as well as placing the wire within the needle body. This design consideration has currently been put on hold and will be implemented once a solid prototypes resolving the other issues has been created. However, as we are testing the behavior of the Nitinol wires, the idea was presented to use multiple thin diameter wires instead of on larger diameter one, in hopes of reducing the actuation temperature.